Interpretation & inversion
We interpret data for subsurface anomalies and changes, we match data to the response from models and invert for reservoir density and density changes and for subsurface compaction.

A further stage of data analysis is to compare observations with models of changes in gravity or height. This is a way of identifying surprises, and may initiate model updates. Model matching can be done in Attrack‘s time-lapse module.
The Chi squared sum (Χ2) statistic is useful for parameter fitting and history matching of observed vs. modelled changes (following Vevatne et al., 2012):

where N is the number of seafloor stations, ΔzR is the measured relative depth change, c1 is a data offset (to be fitted), c2 is a scale factor (to be fitted), Sm is modelled subsidence, and σ is the estimated error of a measured difference.
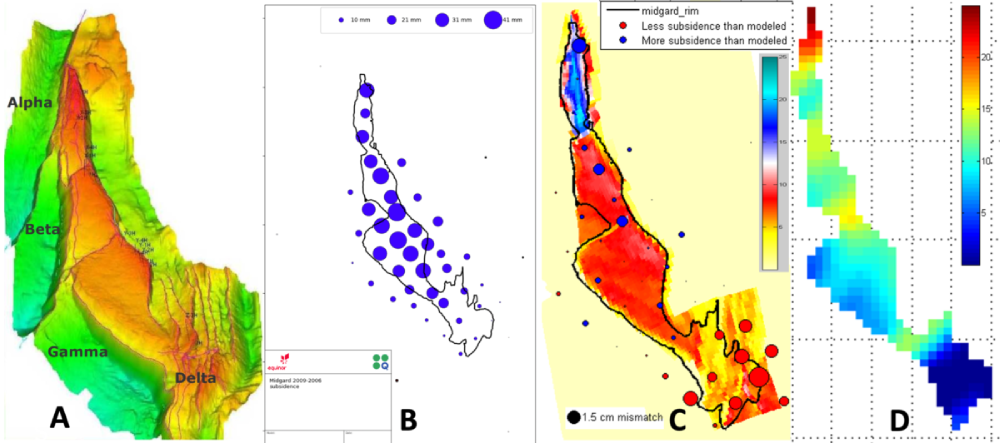
The figure below show in (B) seafloor subsidence of up to 4 cm over 3 years at the Midgard field (Eiken et al. 2022). Panel C shows the mismatch with the subsidence predicted from the reservoir flow model coupled with a Geertsma geomechanical model, for each station. The red circles in the south (the Delta-segment) show that the seafloor has subsided less than expected. A well was drilled into the Delta-segment and received water breakthrough already after two years of production. The subsidence mis-match suggested faults acted as barriers. A new well was drilled and confirmed the lack of depletion.