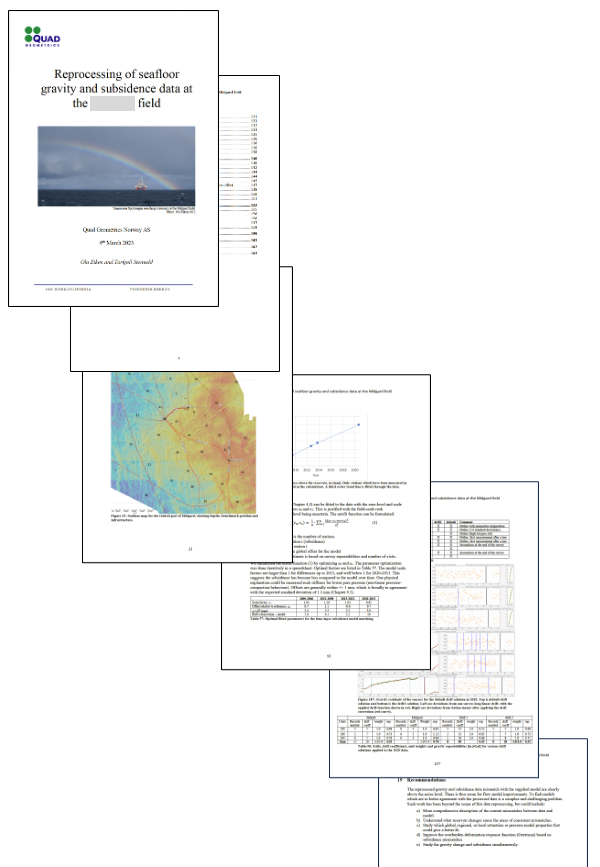
Raw & processed data for gravity & height measurements
Data and reports
Raw and processed data represent the basic value of gravity and height measurements. Data products of different types and formats are delivered, as listed here below. Reports describe data acquisition, processing and analysis, representing the refined knowledge and value derived from the data.